Flash Attention 的核心洞察:GPU 的计算速度远快于内存读写速度,通过巧妙的分块策略和在线算法,我们可以用"多算一点"换取"少读写很多",最终实现 2-4 倍的端到端加速。
21.1 为什么需要 Flash Attention
21.1.1 一个令人困惑的现象
假设你正在训练一个 Transformer 模型,使用的是顶级的 NVIDIA A100 GPU,理论算力高达 312 TFLOPS(FP16)。按理说,这么强大的计算能力应该能让训练飞快进行。但实际情况是:当序列长度增加时,训练速度急剧下降,而且经常出现 OOM(Out of Memory)错误。
更诡异的是,即使 GPU 显存还有剩余,即使 GPU 利用率看起来很高,Attention 计算仍然成为瓶颈。这是为什么?
答案藏在一个被大多数人忽视的地方:内存带宽。
21.1.2 Attention 的内存困境
让我们回顾一下标准 Attention 的计算公式:
这个公式看起来很简洁,但隐藏着一个巨大的问题。假设序列长度为 ,每个 token 的维度为 :
- 的形状是
- 的形状是
- 的形状是
当 (这在现代 LLM 中很常见), 矩阵的大小是 个元素。如果使用 FP16,这需要约 32MB 的内存。
这还只是单个 Attention 头、单个样本的情况。考虑到:
- 多头注意力(比如 32 个头)
- Batch size(比如 8)
- 需要存储中间结果用于反向传播
内存需求会爆炸式增长:,仅仅是存储 Attention 矩阵就需要这么多!
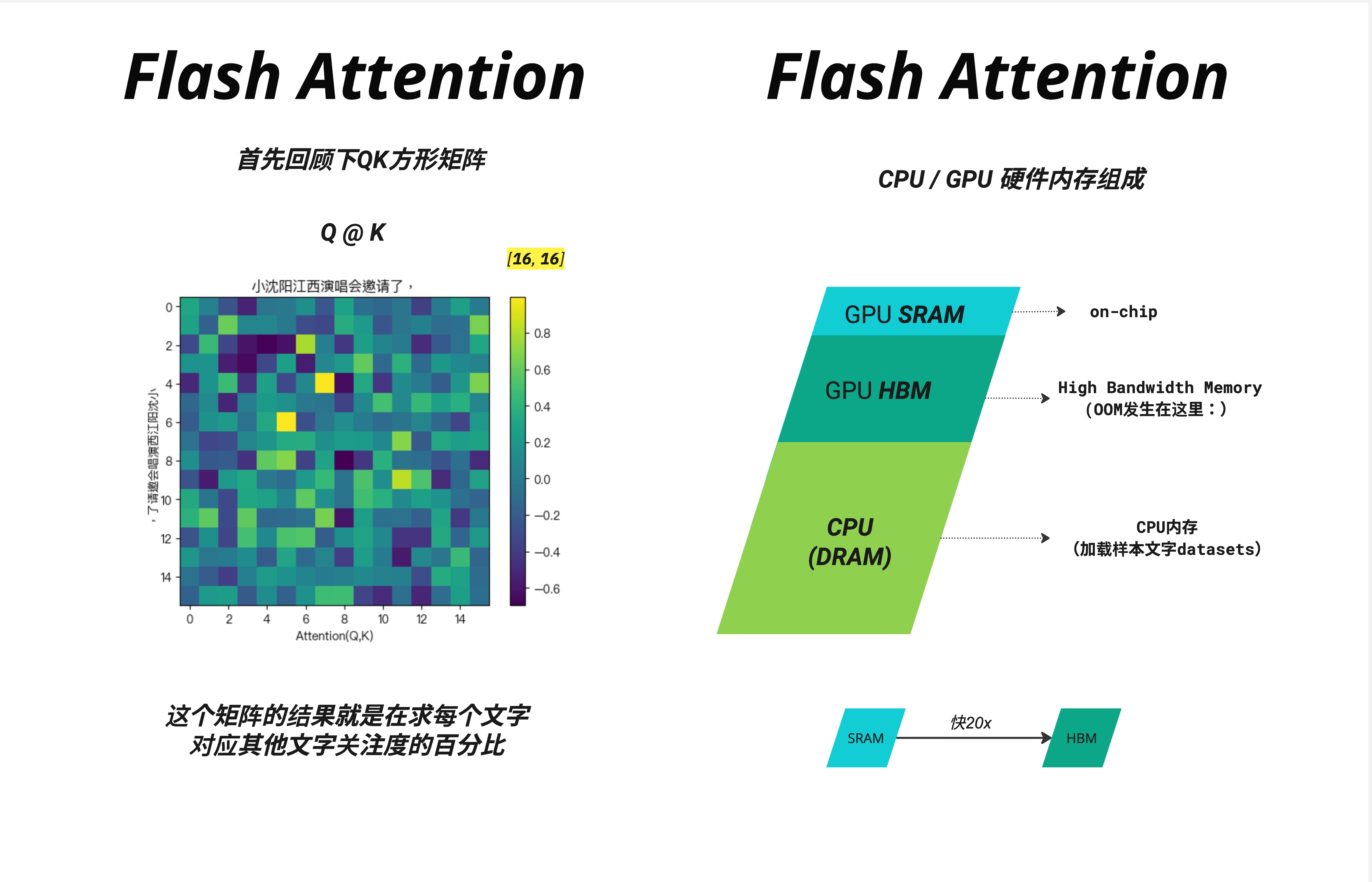
上图左侧展示了 矩阵的可视化——这是一个 的小例子,每个格子的值代表了一个 token 对其他 token 的关注程度。而右侧展示了 GPU 的内存层级结构,这是理解 Flash Attention 的关键。
21.1.3 GPU 内存层级:速度与容量的权衡
GPU 的内存并不是一个统一的整体,而是分为多个层级:
| 层级 | 名称 | 容量 | 速度 | 说明 |
|---|---|---|---|---|
| 片上 | SRAM(共享内存/L1/L2缓存) | ~20 MB | ~19 TB/s | 极快但极小 |
| 显存 | HBM(高带宽内存) | ~40-80 GB | ~1.5-3 TB/s | GPU 主内存 |
| 主机 | CPU DRAM | ~1 TB | ~12.8 GB/s | 更大更慢 |
关键洞察:SRAM 比 HBM 快大约 20 倍!
这就像你的书桌(SRAM)和书架(HBM)的关系:
- 书桌上放不了几本书,但取用极快
- 书架能放很多书,但每次去取都要站起来走过去
传统的 Attention 实现是这样工作的:
- 从 HBM 读取 → 计算 → 写回 HBM
- 从 HBM 读取 → 做 softmax → 写回 HBM
- 从 HBM 读取 softmax 结果和 → 计算最终输出 → 写回 HBM
每一步都涉及大量的 HBM 读写!这就是瓶颈所在。
21.2 传统实现 vs Flash Attention
21.2.1 PyTorch 标准实现的问题
让我们看看 PyTorch 中标准 Attention 的计算过程:
# 标准 Attention 实现
def standard_attention(Q, K, V):
# 步骤 1: 计算 QK^T,结果存入 HBM
scores = torch.matmul(Q, K.transpose(-2, -1)) / math.sqrt(d_k)
# 步骤 2: 从 HBM 读取 scores,计算 softmax,结果存回 HBM
attention_weights = torch.softmax(scores, dim=-1)
# 步骤 3: 应用 dropout(可选),又是一次 HBM 读写
attention_weights = dropout(attention_weights)
# 步骤 4: 从 HBM 读取权重和 V,计算输出
output = torch.matmul(attention_weights, V)
return output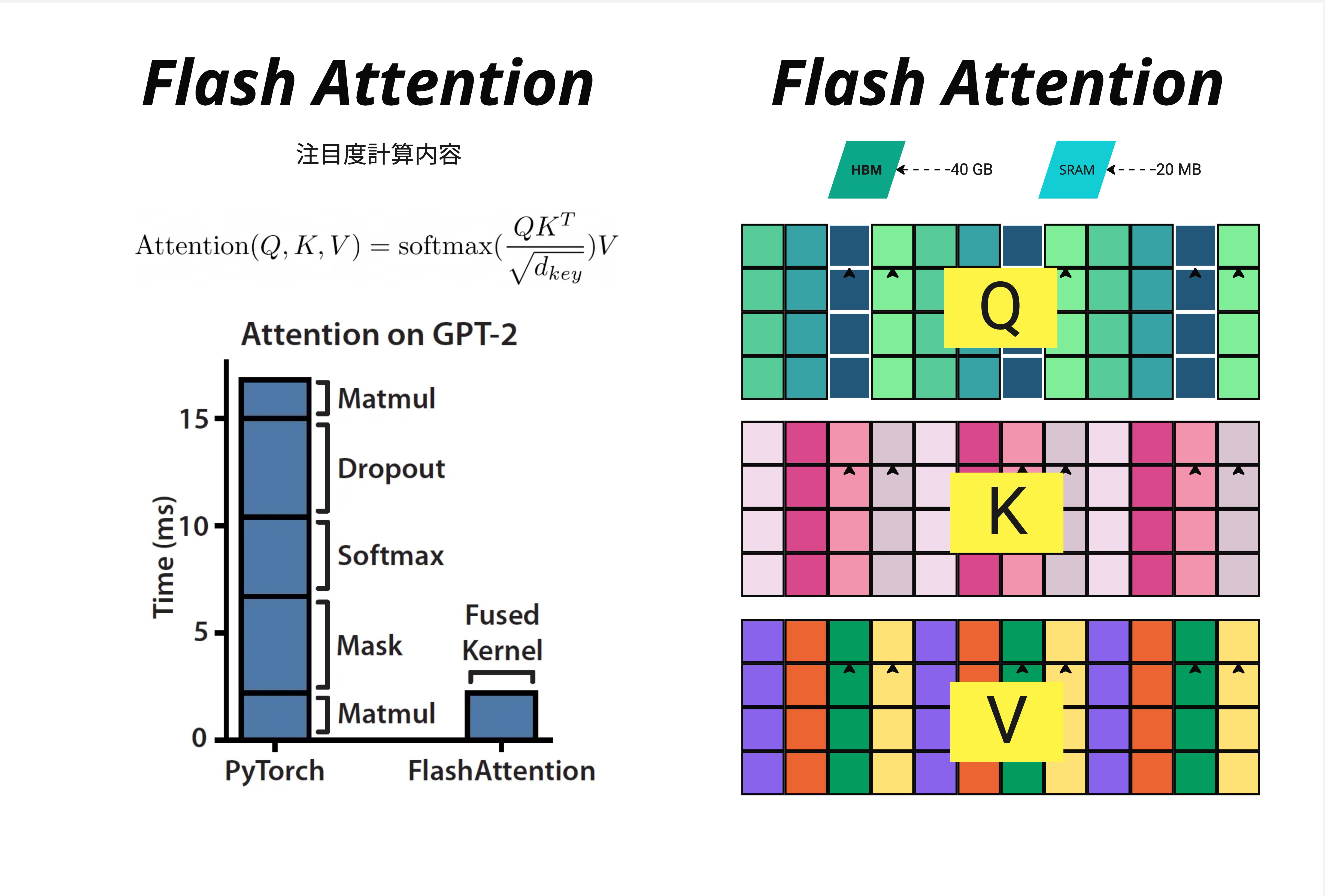
上图左侧的柱状图清楚地展示了问题所在。在 GPT-2 的 Attention 计算中:
- PyTorch 实现:需要约 15ms,其中大部分时间花在 Matmul、Dropout、Softmax、Mask 等操作上
- Flash Attention:仅需约 3ms,因为它将所有操作融合成一个 Fused Kernel
性能提升了 5 倍!而且这还只是时间上的提升,内存占用的减少更加显著。
21.2.2 内存占用对比
右图展示了 Q、K、V 矩阵在 HBM(~40GB)和 SRAM(~20MB)之间的存储情况。传统方法需要将完整的 Attention 矩阵存储在 HBM 中,而 Flash Attention 只需要在 SRAM 中处理小块数据。
内存复杂度对比:
- 标准 Attention: —— 需要存储完整的 Attention 矩阵
- Flash Attention: —— 只需要存储输入和输出,不需要存储中间的大矩阵
这意味着:
- 序列长度 2048 时,Flash Attention 节省约 2048 倍的中间内存( vs )
- 序列长度 4096 时,节省约 4096 倍
注:实际节省倍数约等于序列长度 N,因为从 降到 。
21.3 Flash Attention 的核心思想:Tiling(分块)
21.3.1 分块策略的直觉
Flash Attention 的核心思想可以用一个简单的类比来理解:
想象你要计算一个很大的乘法表(比如 100x100)。传统方法是:
- 先算出整个乘法表,写在一张大纸上
- 然后对每一行做处理(softmax)
- 最后用处理后的结果继续计算
Flash Attention 的方法是:
- 把大表分成小块(比如 10x10 的小块)
- 每次只处理一个小块,在小纸条(SRAM)上完成所有计算
- 边算边更新最终结果,不需要存储整个大表
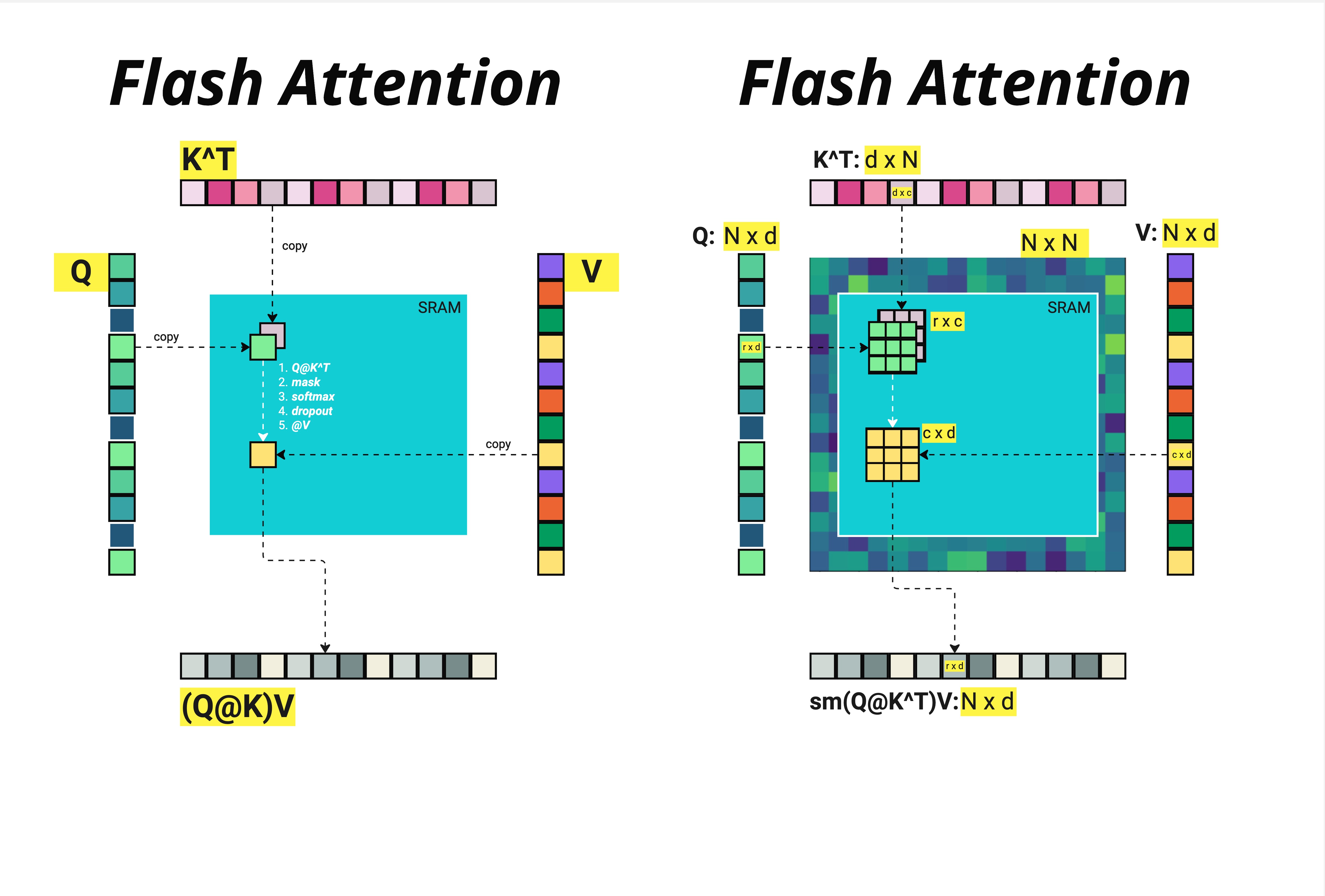
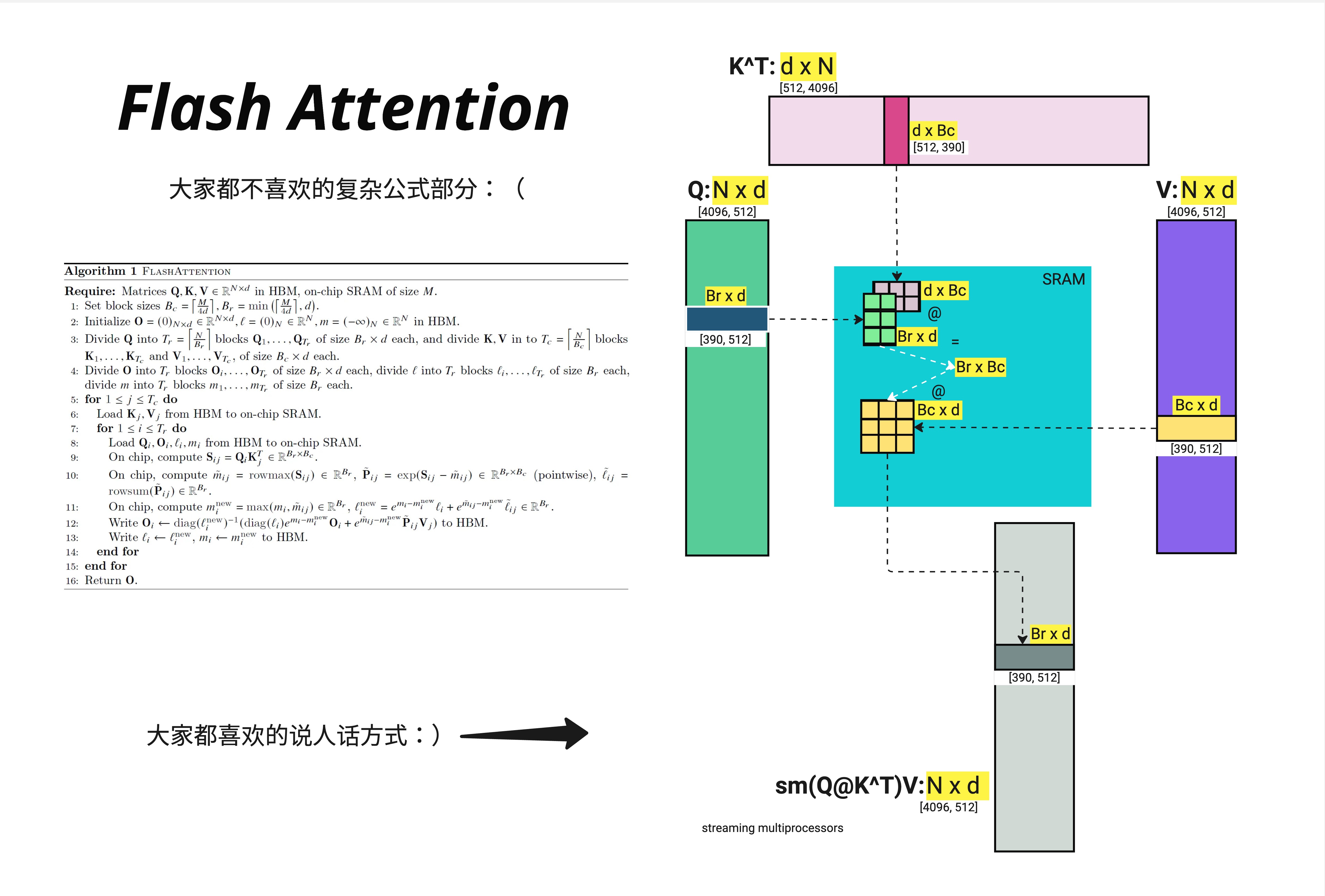
上图清晰地展示了这个过程:
- 左侧:将 、、 的小块复制到 SRAM 中
- 在 SRAM 内完成:1. → 2. mask → 3. softmax → 4. dropout → 5.
- 将结果 写回 HBM
右侧展示了矩阵维度的对应关系:
- : (例如 4096 x 512)
- :
- 中间结果 : (这个巨大的矩阵我们不再完整存储!)
- 输出:
21.3.2 分块大小的计算
在 NVIDIA A100 GPU 上,SRAM 大小约为 192KB。我们需要在 SRAM 中同时存放:
- 的一个块:
- 的一个块:
- 的一个块:
- 输出块:
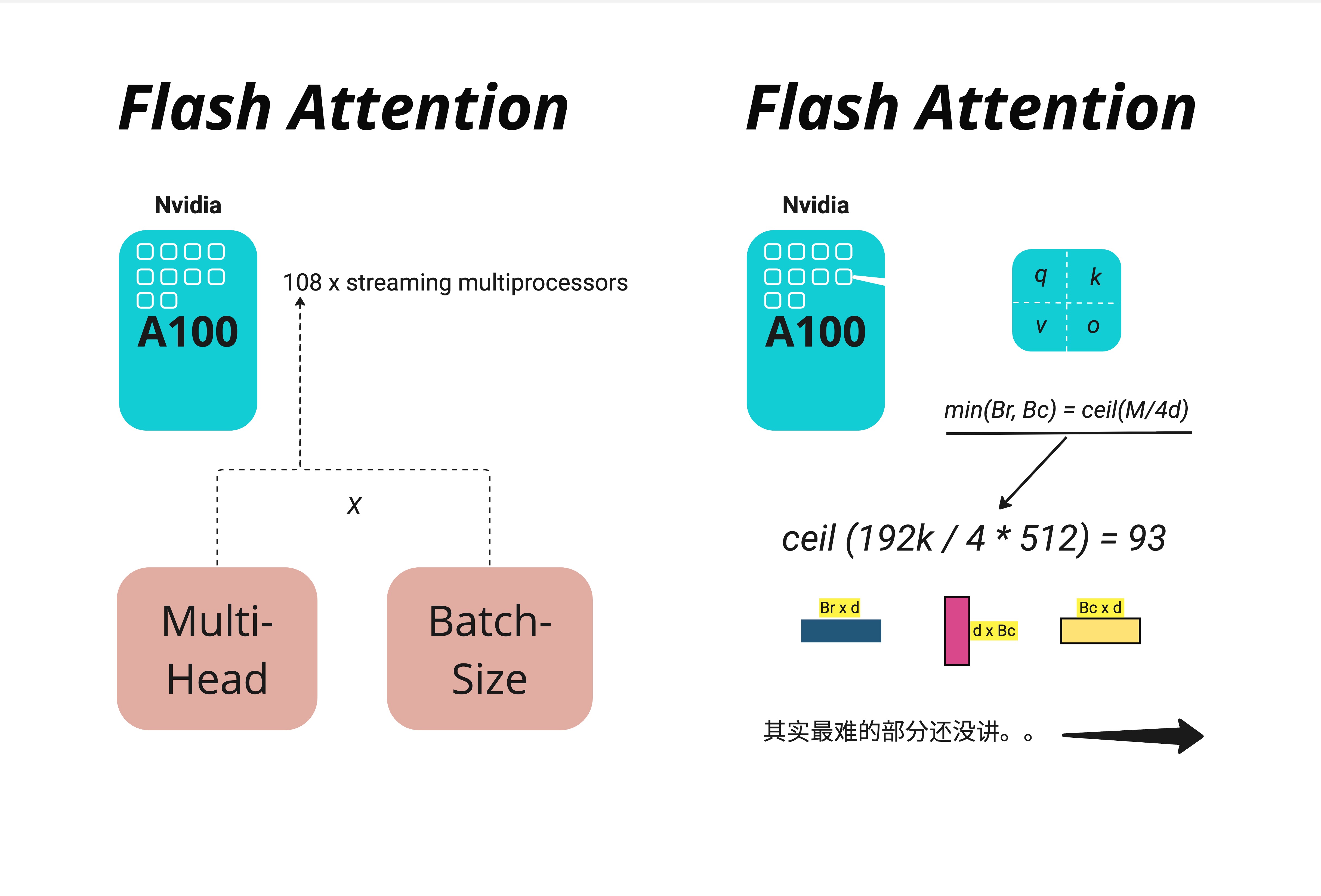
根据上图,A100 有 108 个 Streaming Multiprocessors(SM),每个 SM 都有自己的 SRAM。分块大小的计算公式是:
其中 是 SRAM 大小(192KB), 是 head dimension(通常是 64 或 128)。
例如,当 字节, 时:
但实际实现中,为了对齐和效率,通常会选择 或 。
21.3.3 分块计算的详细流程
上图展示了 Flash Attention 的完整算法和对应的可视化。让我们用更直观的方式来理解:
输入:
- : —— 存储在 HBM 中
- : —— 存储在 HBM 中
- : —— 存储在 HBM 中
分块:
- 将 分成 个块,每块大小 ,即
- 将 分成 个块,每块大小
核心循环(伪代码):
for j = 1 to T_c: # 外层循环:遍历 K, V 的块
将 K_j, V_j 从 HBM 加载到 SRAM
for i = 1 to T_r: # 内层循环:遍历 Q 的块
将 Q_i 从 HBM 加载到 SRAM
# 在 SRAM 中完成所有计算
S_ij = Q_i @ K_j^T # 小块矩阵乘法
P_ij = softmax(S_ij) # 分块 softmax(需要特殊处理!)
O_i = O_i + P_ij @ V_j # 累加输出
将更新后的 O_i 写回 HBM等等,这里有一个问题:Softmax 是对整行做的,但我们只有一小块数据,怎么办?
这就需要引入 Flash Attention 最巧妙的部分:Online Softmax。
21.4 Online Softmax:分块计算 Softmax 的魔法
21.4.1 标准 Softmax 的问题
先回顾一下 Softmax 公式:
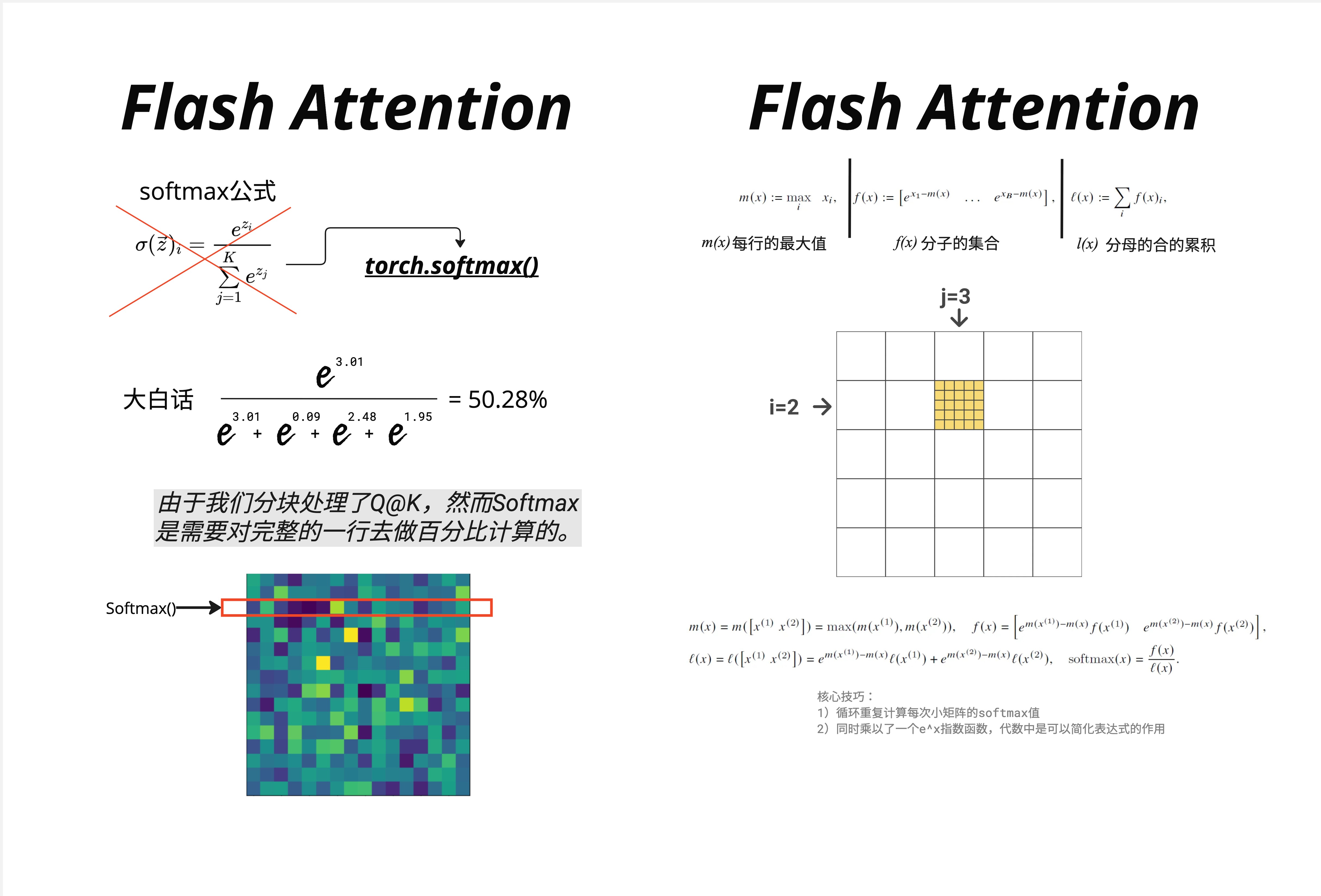
上图左侧展示了标准 Softmax 的计算方式。举个具体例子:
假设一行的值是 ,计算第一个元素的 softmax:
问题在于:分母需要所有元素的和。但在分块计算时,我们一次只能看到部分元素!
21.4.2 Online Softmax 的核心技巧
Online Softmax 的关键洞察是:我们可以边看边更新,而不需要一次性看到所有数据。
为了实现这一点,我们需要维护三个量:
- :当前已见元素的最大值
- :分子的集合(调整后的指数值)
- :分母的累积和
当新的数据块到来时,我们可以用以下公式更新:
合并两个块的规则:
假设我们已经处理了第一块 ,现在来了第二块 :
-
更新最大值:
-
更新分子:
-
更新分母:
-
最终 softmax:
21.4.3 为什么需要跟踪最大值?
你可能注意到了,公式中反复出现 这样的项。这是为了数值稳定性。
直接计算 当 很大时会溢出。标准做法是先减去最大值:
在 Online Softmax 中,由于我们分块处理,每个块有自己的局部最大值。当遇到新块时,全局最大值可能会更新,我们需要用 来"修正"之前的计算结果。
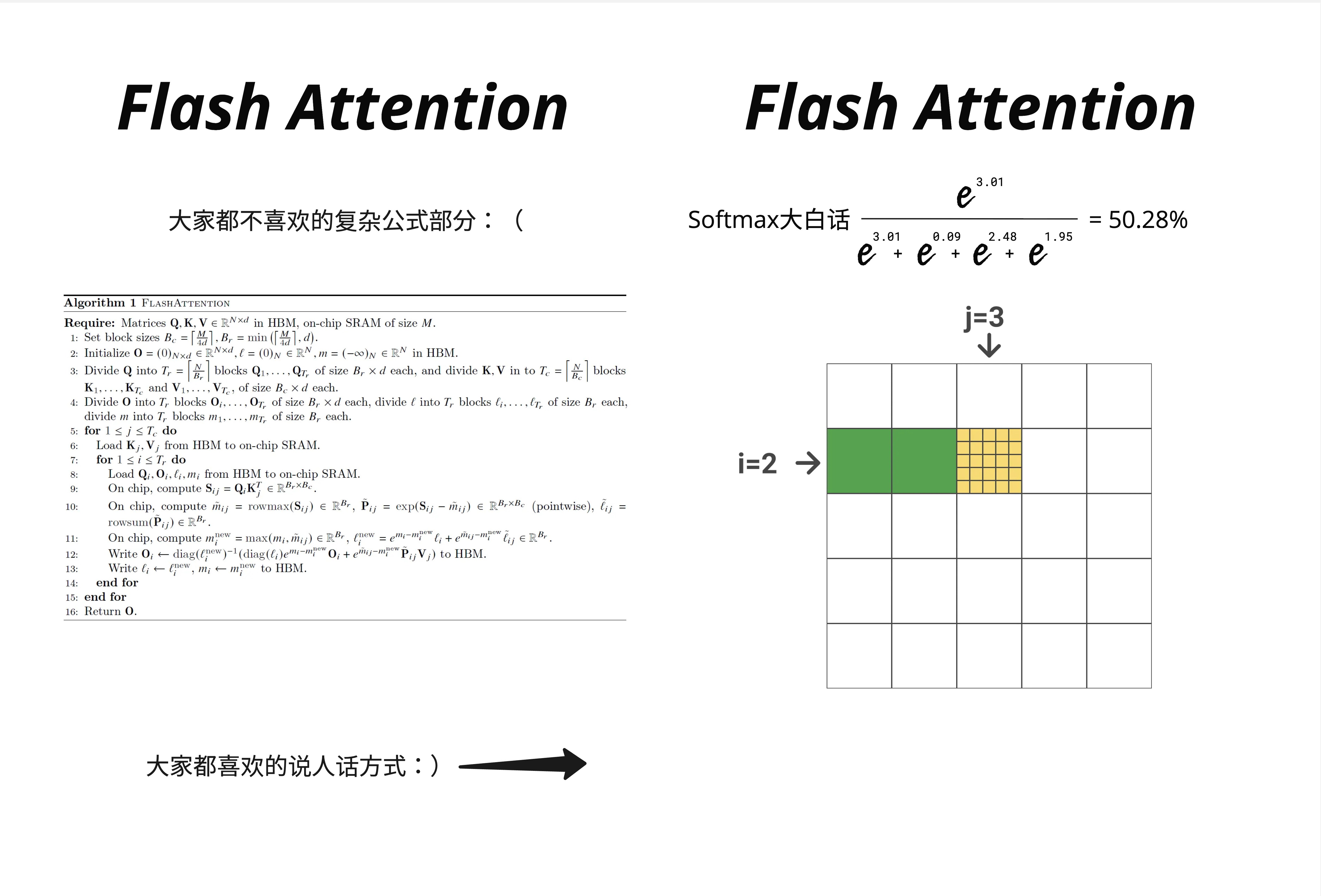
上图右侧展示了分块处理的过程。绿色块表示已经处理完的部分,黄色块表示当前正在处理的块(例如 的位置)。
21.4.4 手算示例
让我们用一个小例子来验证 Online Softmax 的正确性。
假设完整的一行是 ,我们分成两块处理:
- 第一块
- 第二块
处理第一块:
处理第二块并合并:
- (最大值没变)
- 修正因子:,
计算第一个元素的 softmax:
这与直接计算的 50.28% 非常接近(差异来自我们简化的计算)!
21.5 Flash Attention 完整算法
21.5.1 算法伪代码
现在我们可以理解完整的 Flash Attention 算法了:
Algorithm: FLASHATTENTION
Input: Q, K, V ∈ R^{N×d} in HBM, on-chip SRAM of size M
1. 设置块大小 B_c = ceil(M / 4d), B_r = min(ceil(M / 4d), d)
2. 初始化 O = 0, l = 0, m = -∞ in HBM
3. 将 Q 分成 T_r = ceil(N / B_r) 个块 Q_1, ..., Q_{T_r}
4. 将 K, V 分成 T_c = ceil(N / B_c) 个块 K_1, ..., K_{T_c} 和 V_1, ..., V_{T_c}
5. for j = 1 to T_c do:
6. 从 HBM 加载 K_j, V_j 到 SRAM
7. for i = 1 to T_r do:
8. 从 HBM 加载 Q_i, O_i, l_i, m_i 到 SRAM
9. 在 SRAM 中计算 S_ij = Q_i @ K_j^T
10. 计算 m̃_ij = rowmax(S_ij), P̃_ij = exp(S_ij - m̃_ij), l̃_ij = rowsum(P̃_ij)
11. 计算 m_i^new = max(m_i, m̃_ij)
12. 计算 l_i^new = e^{m_i - m_i^new} × l_i + e^{m̃_ij - m_i^new} × l̃_ij
13. 更新 O_i ← diag(l_i^new)^{-1} × (diag(l_i) × e^{m_i - m_i^new} × O_i + e^{m̃_ij - m_i^new} × P̃_ij × V_j)
14. 将 O_i, l_i^new, m_i^new 写回 HBM
15. end for
16. end for
17. Return O21.5.2 IO 复杂度分析
Flash Attention 的巧妙之处在于大大减少了 HBM 访问次数。
标准 Attention 的 IO 复杂度:
- 读取 :
- 写入 :
- 读取 做 softmax:
- 写入 softmax 结果:
- 读取 softmax 结果和 :
- 写入输出:
- 总计:
Flash Attention 的 IO 复杂度:
- 外层循环读取 : 次,每次
- 内层循环读写 : 次,每次
- 总计:
当 SRAM 大小 足够大时(通常 ),Flash Attention 的 IO 复杂度接近 ,比标准实现的 好很多!
21.6 Flash Attention 1 vs Flash Attention 2
21.6.1 FA1 的局限性
Flash Attention 1(2022 年发布)虽然已经实现了巨大的性能提升,但还有优化空间。
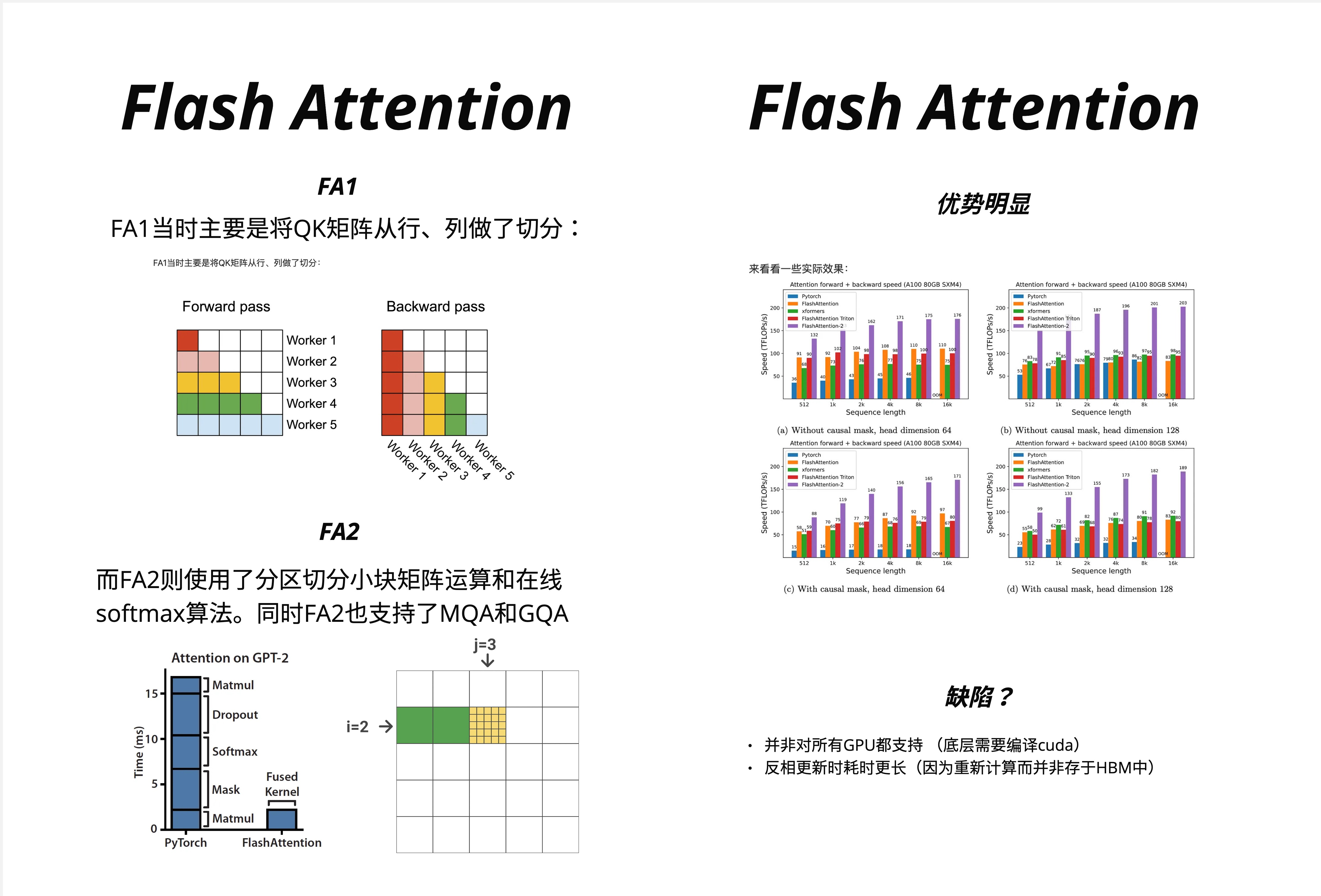
上图左侧展示了 FA1 的工作方式:
- 按行、列切分 QK 矩阵
- Forward pass 和 Backward pass 分别由多个 Worker 并行处理
- 但 Worker 之间需要同步,造成了一些等待时间
21.6.2 FA2 的改进
Flash Attention 2(2023 年发布)做了几个关键改进:
-
更好的并行策略:
- FA2 使用了分区切分小块矩阵运算
- 减少了 Worker 之间的同步开销
- 更充分地利用 GPU 的 Streaming Multiprocessors
-
支持 MQA 和 GQA:
- Multi-Query Attention(MQA)
- Grouped-Query Attention(GQA)
- 这些变体在推理时特别有用,FA2 原生支持
-
更高效的 Online Softmax 实现:
- 优化了数值计算的精度和效率
- 减少了寄存器使用
上图右侧展示了性能对比:
- 在 A100 80GB SXM4 GPU 上测试
- 不同序列长度(512 到 16k)和 head dimension(64 和 128)
- FlashAttention-2 consistently 达到最高吞吐量,通常比 FA1 快 1.5-2 倍
21.6.3 性能数据
根据官方 benchmark:
| 配置 | PyTorch | FA1 | FA2 |
|---|---|---|---|
| Seq 2k, head_dim 64 | ~50 TFLOPS | ~120 TFLOPS | ~175 TFLOPS |
| Seq 4k, head_dim 64 | ~45 TFLOPS | ~110 TFLOPS | ~170 TFLOPS |
| Seq 8k, head_dim 128 | ~40 TFLOPS | ~100 TFLOPS | ~165 TFLOPS |
FA2 能够达到 A100 理论峰值(312 TFLOPS)的约 50-70%,这对于一个 memory-bound 的操作来说已经非常优秀了。
21.7 Flash Attention 的局限性
尽管 Flash Attention 非常强大,但也有一些局限性需要了解:
21.7.1 硬件兼容性
- 需要特定 GPU 架构:Flash Attention 底层使用 CUDA 实现,需要较新的 NVIDIA GPU(Ampere 架构及以上效果最好)
- 需要编译 CUDA 代码:安装过程可能遇到编译问题
- 不支持所有 GPU:老旧的 GPU 或非 NVIDIA GPU 无法使用
21.7.2 反向传播的开销
由于 Flash Attention 不存储完整的 Attention 矩阵,在反向传播时需要重新计算这些值。这意味着:
- 反向传播耗时更长:相比标准实现,反向传播需要额外的计算
- 总体仍然更快:因为节省的内存带宽远超额外的计算开销
21.7.3 特定功能支持
某些 Attention 变体可能需要特殊处理:
- Sliding Window Attention
- Sparse Attention patterns
- 自定义的 Attention mask
好消息是,Flash Attention 2 已经支持了大部分常见的变体。
21.8 实际使用:代码示例
21.8.1 安装 Flash Attention
# 推荐使用 pip 安装
pip install flash-attn --no-build-isolation
# 或者从源码安装(需要 CUDA toolkit)
git clone https://github.com/Dao-AILab/flash-attention.git
cd flash-attention
pip install .21.8.2 基本使用
import torch
from flash_attn import flash_attn_func
# 准备输入
batch_size = 2
seq_len = 4096
num_heads = 32
head_dim = 128
# Q, K, V 形状: [batch, seq_len, num_heads, head_dim]
q = torch.randn(batch_size, seq_len, num_heads, head_dim,
dtype=torch.float16, device='cuda')
k = torch.randn(batch_size, seq_len, num_heads, head_dim,
dtype=torch.float16, device='cuda')
v = torch.randn(batch_size, seq_len, num_heads, head_dim,
dtype=torch.float16, device='cuda')
# 调用 Flash Attention
output = flash_attn_func(q, k, v, causal=True) # causal=True 用于自回归模型21.8.3 与 PyTorch 集成
PyTorch 2.0+ 已经内置了 Flash Attention 支持:
import torch
import torch.nn.functional as F
# 使用 scaled_dot_product_attention(会自动选择最佳实现)
output = F.scaled_dot_product_attention(
query, key, value,
attn_mask=None,
dropout_p=0.0,
is_causal=True,
scale=None
)
# PyTorch 会自动判断是否使用 Flash Attention、Memory Efficient Attention 或标准实现21.8.4 在 Hugging Face Transformers 中使用
from transformers import AutoModelForCausalLM
# 加载模型时启用 Flash Attention 2
model = AutoModelForCausalLM.from_pretrained(
"meta-llama/Llama-2-7b-hf",
torch_dtype=torch.float16,
attn_implementation="flash_attention_2" # 关键参数
)21.9 本章要点回顾
-
GPU 内存瓶颈:现代 GPU 的计算速度远快于内存带宽,Attention 计算的瓶颈在于 HBM 读写,而非算力
-
内存层级:
- SRAM:~20MB,极快(~19 TB/s)
- HBM:~40GB,相对慢(~1.5 TB/s)
- SRAM 比 HBM 快约 20 倍
-
Tiling 分块策略:
- 将大矩阵分成小块,在 SRAM 中完成所有计算
- 避免将 的 Attention 矩阵写入 HBM
- 内存复杂度从 降到
-
Online Softmax:
- 维护 (最大值)、(分子)、(分母)
- 边处理边更新,不需要看到完整的一行
- 保证数值稳定性
-
FA1 vs FA2:
- FA2 有更好的并行策略
- FA2 支持 MQA/GQA
- FA2 比 FA1 快 1.5-2 倍
-
实际效果:
- 端到端训练速度提升 2-4 倍
- 内存占用大幅降低
- 支持更长的序列长度
21.10 延伸阅读
-
Flash Attention 论文:
-
官方实现:
-
相关技术:
- Memory Efficient Attention(xFormers)
- PagedAttention(vLLM)
- Flash Decoding
21.11 下一章预告
在下一章《KV Cache:推理加速的关键》中,我们将探讨另一个重要的优化技术。KV Cache 解决的是推理阶段的重复计算问题:在自回归生成时,每生成一个新 token 都需要对之前所有 token 做 Attention,如果不缓存 K、V 矩阵,计算量会随着序列增长而急剧增加。
KV Cache 和 Flash Attention 是互补的技术:
- Flash Attention:优化单次 Attention 计算的内存效率
- KV Cache:避免推理时的重复计算
两者结合使用(如 Flash Decoding),可以实现更快的推理速度。